
一様変動円運動(MCUV) は、曲線経路をたどる際の物体の速度の変化によって定義されます。この角速度の変化は、動きに接する直線加速度の存在によって発生します。したがって、MCUV には向心加速度と直線加速度の 2 つの加速度が存在します。均一に変化する円運動には、ジェット コースター ループの明確な例があります。下り坂は重力と同じ方向、上り坂は重力に逆らうため、上り坂よりも速度が大きくなります。
円運動の概要
一様変動円運動 (MCUV) は、動きによって描かれる曲線または円の経路に沿った速度の変化によって特徴付けられます。
均一に変化する円運動には、求心加速度と直線加速度の 2 つの加速度が存在します。
求心加速度は曲線の中心に向かって発生し、動作中に発生します。そのため、ラジアル タイプとなります。線速度に対して垂直であるため、方向は変わりますが、大きさには影響しません。
線形加速度は動きの接線方向であり、速度の変化に影響します。線速度の大きさに影響します。
移動によって生じる加速度は、向心加速度と接線加速度のベクトル和に相当します。
角加速度は、角速度の変化に関与する要因です。これは、角速度の変化と、この変化が発生するのに必要な時間との比です。
等速円運動 (MCU) では、線速度は一定です。したがって、角速度も関係します。
MCU と MCUV の違いは、前者では、加速度が変位に対して垂直であるため、速度が一定であることです。 2 番目では、線形加速度の存在により変化が生じます。
一様変動円運動 (MCUV) とは何ですか?
均一変動円運動 (MCUV) は、変位の線形速度を変化させる線形加速度の存在により、円またはその一部が変位のいくつかの段階で速度を変化させる動きです。スピードアングルも。
.jpg)
一様変動円運動加速度 (MCUV) の種類
一様変動円運動 (MCUV) には 4 種類の加速度があります。以下でそれぞれを見ていきます。

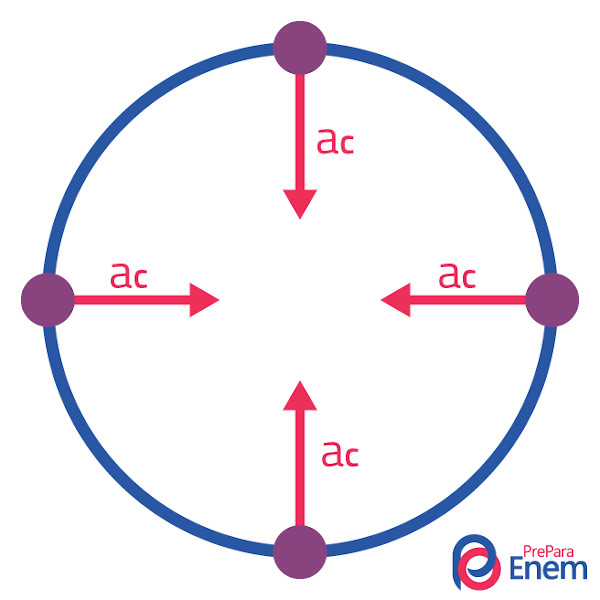
→ 向心加速度
向心加速度は、円の半径の方向がその中心に向かうため、放射状とも呼ばれます。線速度に対して垂直であるため、線速度の数値 (係数) には影響しませんが、動きを円形にするものです。
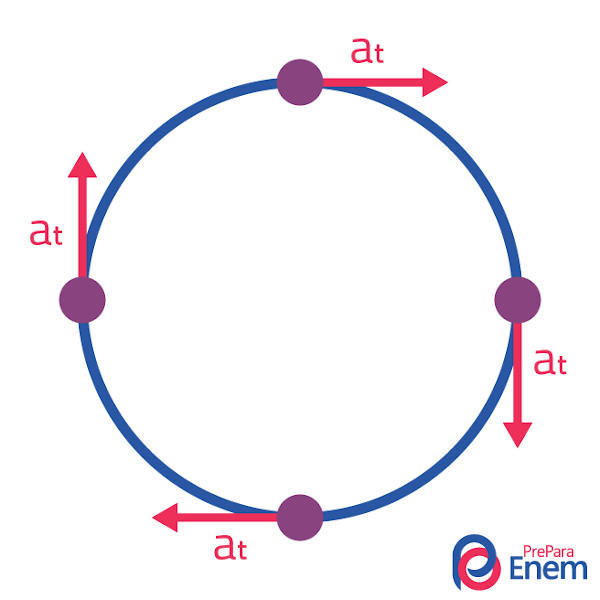
→ 接線加速度
接線方向の加速度は直線加速度であり、このタイプの動きでは接線方向と呼ばれます。方向が直線であるため、動きに接しています。これは線速度の大きさを変化させ、その結果として角速度を変化させます。つまり、その存在により、動きが均一に変化する円形であるとみなされるのです。
→ 結果として生じる加速度
結果として得られる加速度は、垂直方向の向心加速度と接線加速度のベクトル和です。これは、脚が向心加速度と接線加速度であり、その結果が斜辺の位置を占めるピタゴラスの定理によって得られます。
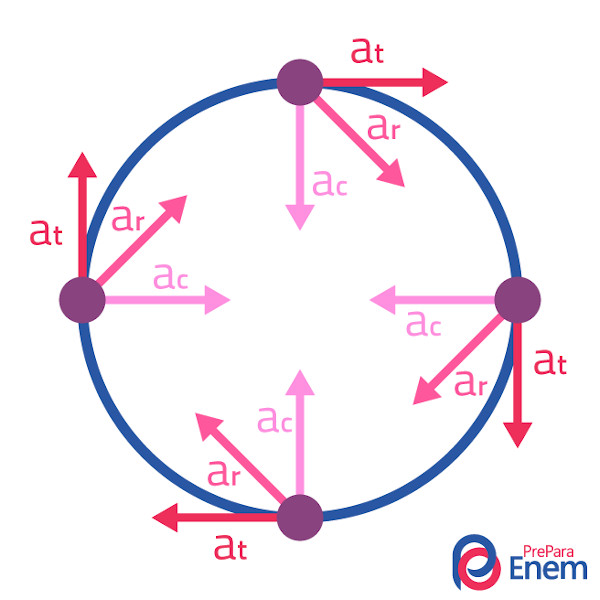
\(a_R^2=a_c^2+a_t²\)
→ 角加速度
角加速度は、角速度を時間とともに変化させる要因です。これは、接線方向の加速度と、運動で説明される円の半径との比です。

一様変動円運動 (MCUV) の公式
MCUV では、式は均一に変化する直線運動の式と似ています。違いは、変位が角度 θ の変化であることです。以下を参照してください:
|
均一に変化する直線運動 |
均一に変化する円運動 |
|
\(v=\オメガ\ブレット R\) |
\(\omega=\frac{v}{R}\) |
|
\(a_t=a=\alpha.R\) |
\(\alpha=\frac{a}{R}\) |
|
\(v=v_0+a\bullet t\) |
\(\omega=\omega_0+\alpha\bullet t\) |
|
\(s=s_0+v_0\bullet t+\frac{a∙t^2}2\) |
\(\theta=\theta_0+\omega_0\bullet t+\frac{\alpha\bullet t^2}{2}\) |
|
\(v^2=v_0^2+2\bullet a\bullet∆s\) |
\(\omega^2=\omega_0^2+2\bullet\alpha\bullet∆θ\) |
|
\(a_m=\frac{∆v}{∆t}\) |
\(\alpha_m=ΔωΔt\) |
|
\(a_c=\frac{v^2}{R}\) |
\(a_c=\omega^2\bullet R\) |
|
\(a_R^2=a_c^2+a_t^2\) |
|
次の数量の意味は、国際単位系 (SI)にあります。したがって、問題内で異なる値がある場合は変換する必要があります。
v = 最終または到着線速度 (m/s)
v 0 = 初期または開始線速度 (m/s)
ω = 最終角速度または到着角速度 (rad/s)
ω 0 = 最終角速度または到着角速度 (rad/s)
a t = a = 接線加速度または直線加速度 (m/s²)
α = 角加速度 (rad/s²)
t = 時間(秒)
θ = 最終角度位置または到着角度位置 (rad)
θ 0 = 初期または開始角度位置 (rad)
s = 最終直線位置または到着 (m)
s 0 = 初期または開始線形位置 (m)
a c = 向心加速度 (m/s²)
R = 動きによって描かれる円の半径 (m)
Δθ = 角変位 (rad)
Δs = 変位または直線距離 (m)

MCUVとMCUの違い
均一変動円運動 (MCUV):動きに対して接線方向の加速度が存在することを特徴とし、一定の加速度により経路に沿って速度が変化します。したがって、均一に変化します。
等速円運動 ( MCU ):動きを特徴づける向心加速度が速度に対して垂直であるため、速度は一定です。したがって、意味には影響しますが、モジュールには影響しません。
簡単に言えば、それらを区別する決定的な要因は線形加速度であり、これにより線形速度モジュール v が変化し、その結果、角速度モジュールも変化します。